 Validation of added resistance in waves for a tanker ship
Validation of added resistance in waves for a tanker ship
Introduction
Today’s ship designers regularly employ numerical methods in order to predict calm water performance and optimize hull forms at an early stage in the design process. The need for this is driven by continuously increasing demands on fuel consumption and stronger regulations on exhaust emissions. However, this is typically only done for a couple of loading conditions and one or a few different speeds in calm water.
In the quest for improved performance, designers now seek to employ a more holistic approach to the design problem where consideration is given to more than just the performance in calm water. It is expected that significant gains in performance over a ship's operational profile and lifetime can be made if consideration is given also to the performance in a seaway.
SHIPFLOW MOTIONS
A large variety of numerical methods for the prediction of a ship’s performance in waves exist today, all having their strengths and weaknesses, typically in terms of capability, computational cost and ease-of-use. The problem of added resistance due to waves, i.e. the increase in resistance when sailing in waves compared to the resistance when sailing in calm water, is very challenging and designers often find it difficult to find a method that strikes a good balance between these three traits. The step from partially nonlinear potential flow methods to fully nonlinear viscous flow methods is very large, both in terms of capability and applicability but also with regard to computational cost.
SHIPFLOW MOTIONS is based on a fully nonlinear potential flow method which is aimed at closing the gap between classical (partially nonlinear) potential flow methods and (fully nonlinear) viscous methods, e.g. URANS solvers.
Case description
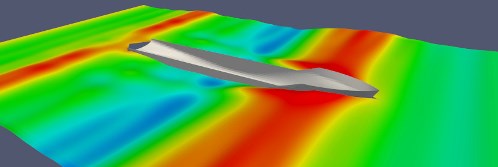
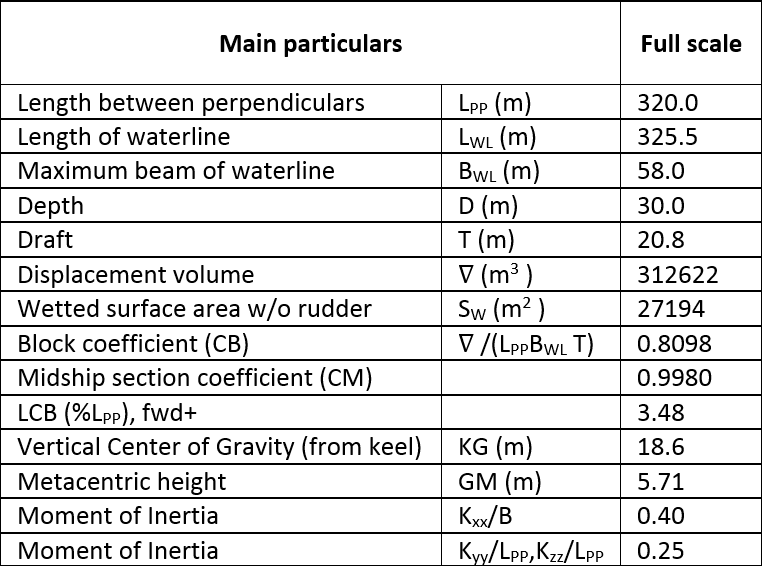
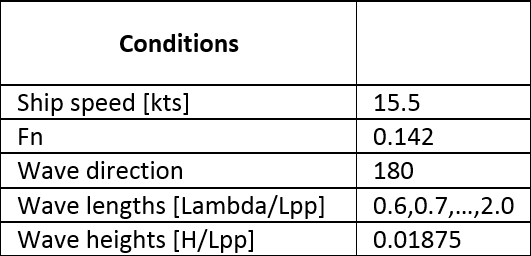
The KVLCC2 tanker from MOERI is a standard validation case for numerical methods. Its main particulars and running conditions are presented in tables.
Results
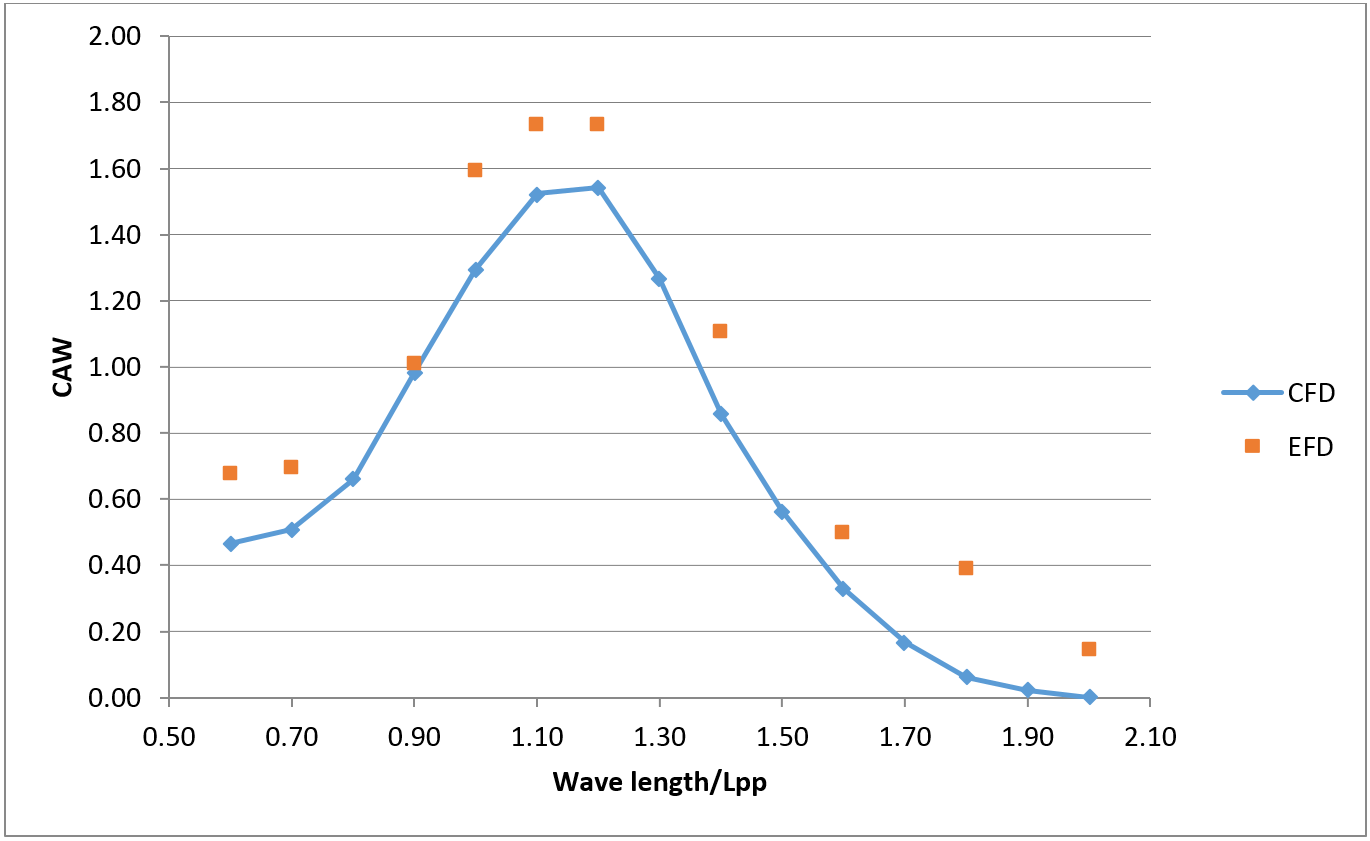
A comparison of added resistance for KVLCC2 in head sea between SHIPFLOW MOTIONS and measurements from Osaka [1] can be seen in the figure below. The computational effort for one wave condition was approximately 3.5 hours on a six-core i7 workstation for typically 15-20 wave encounters.
Discussion and conclusion
As can be seen from the figure, added resistance from SHIPFLOW MOTIONS corresponds well with measurements both in terms of trends and absolute values for KVLCC2.
Computations were performed directly from CAD geometry with the standard FINE mesh. A minimum input of speed, draft, wave length and wave height was required to run these computations. Otherwise the computations were set up automatically.
SHIPFLOW MOTIONS accuracy, robustness, extensive automation and relatively low computational time make it a very capable tool for predicting added resistance.
References
- Larsson, L., Stern, F. and Visonneau, M. (2013) Numerical Ship Hydrodynamics - An Assessment of the Gothenburg 2010 Workshop. Dordrecht : Springer